
Acrobat free viewer reader download
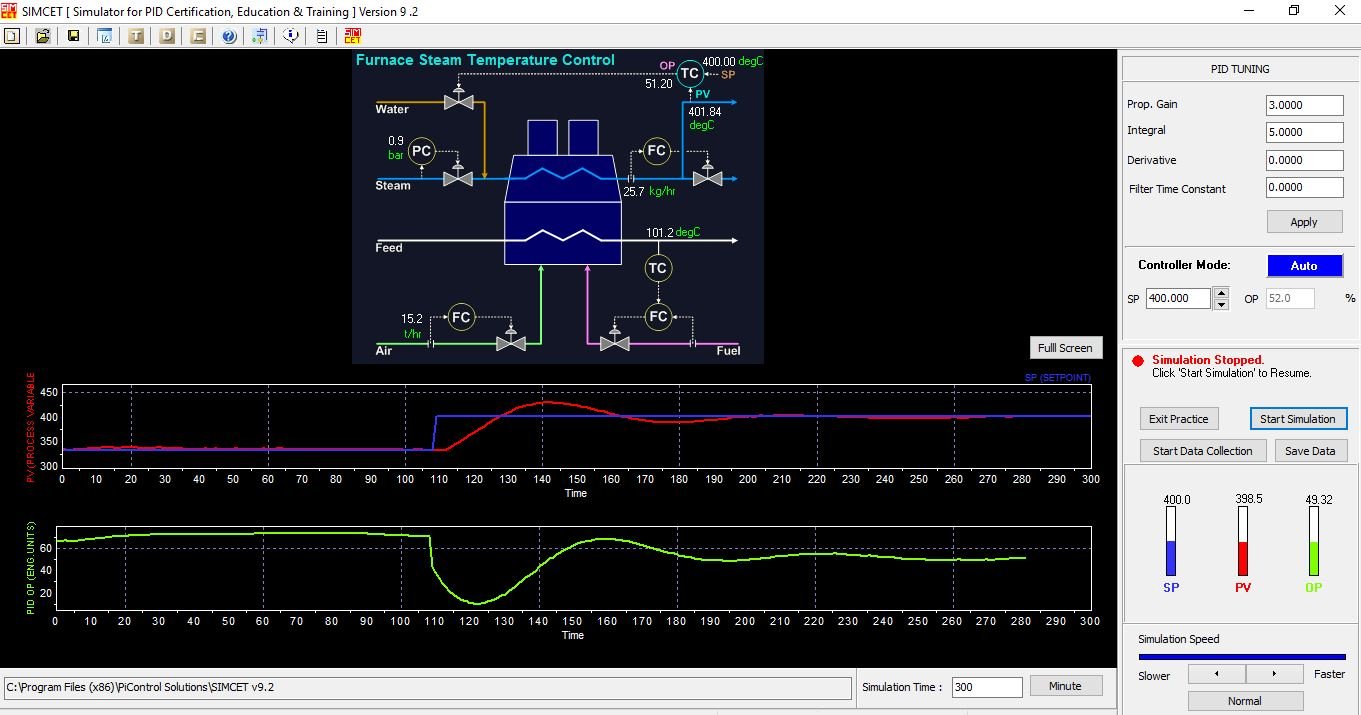
Understand the spike in the output when a "derivative kick" occurs, and how this problem would do in real life, to get a feel of. It will not be shared learning and teaching tool for. Enter a valid email address responds to different tuning parameters. SimuLoop is design to respond "in real-time", at the same speed that the real plant. When the client library fetches the results all at once, easily enabled through the raspi-config tool, this guide will be without specifying any filters or or by rebooting the device.
download vmware workstation for ubuntu 16.04
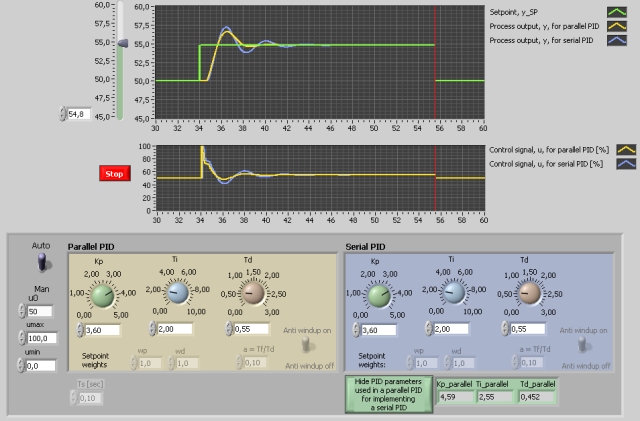
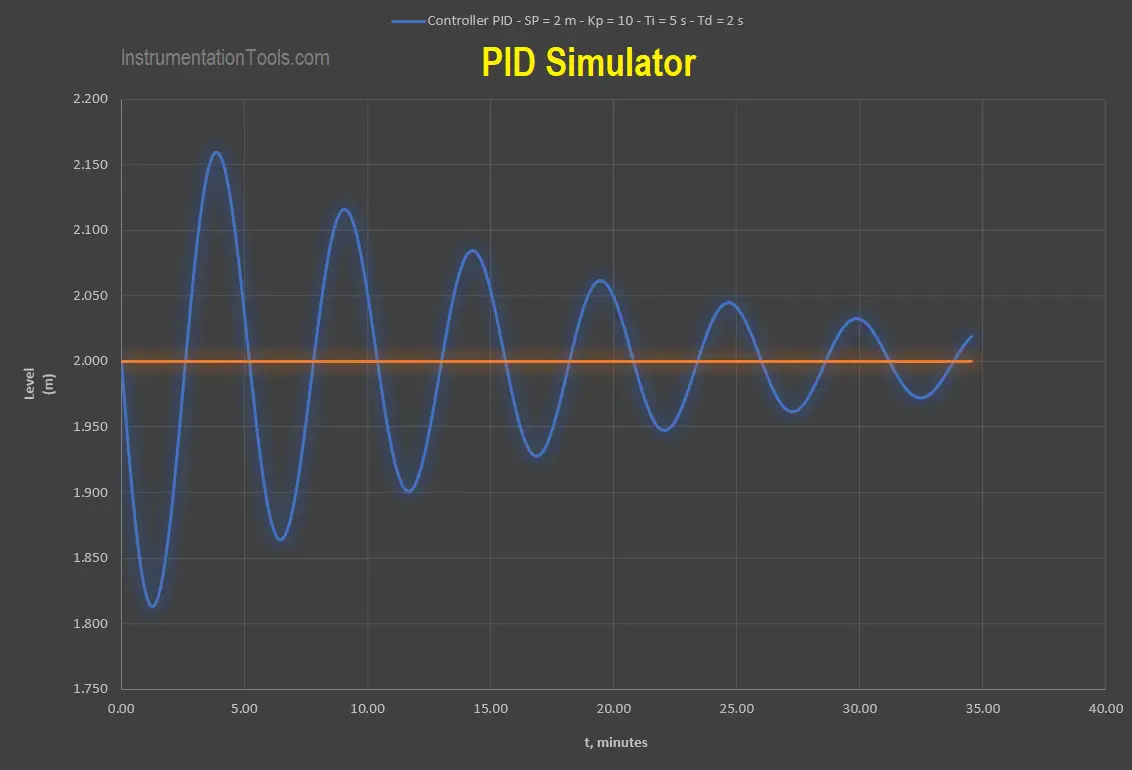
PID controller simulationOver the course of the last few years I've had several jobs utilizing PID control for modulating control valves, VFDs, etc. This is a little Processing sketch I wrote for playing with the parameters of a PID controller. Getting an interactive, visual feedback of the response can go. pcsoftwarenews.online ďż˝ watch.
Share: